4. Autopilot Controls
4.1. Autopilot Steering
Disengage clutch, flip toggle to Standby. Turn power on with Rudder control. Allow one minute to warmup.
Hold boat on heading for at least 30 seconds. Engage clutch. Flip toggle switch to Hold Heading.
Adjust Rudder and Deadband controls to suit conditions.
4.2. Hand Steering
Flip toggle switch to Standby.
Grip the wheel with one hand to relieve the pressure on the wheel. Disengage the clutch with the other hand.
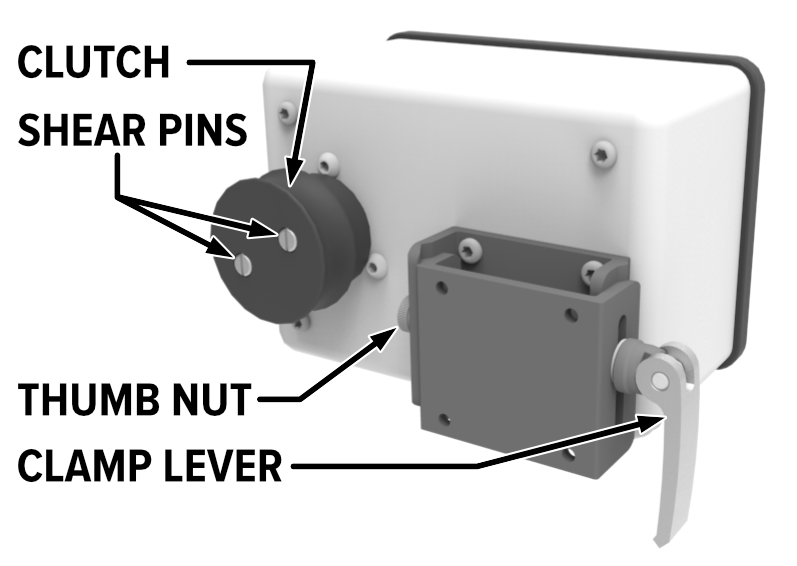
Grasp the black disk on the clutch and pull outward ¼” to disengage the clutch
4.3. Hold Heading / Standby Toggle
After a 1 minute warm up, flipping the switch to HOLD HEADING sets the pilot to the boat’s heading. Hold the boat steady on desired heading about 30 seconds, engage clutch, then flip to HOLD HEADING. Keeping the boat on heading for a longer period before flipping to HOLD HEADING will allow the pilot to match your heading more closely.
When toggled to Standby, the pilot is on standby, and the motor will not turn. The clutch can now be disengaged for hand steering.
The indicator LED is yellow while the autopilot is warming up. After approximately one minute, the LED will change to red or green depending on the position of the toggle switch. Allow at least one minute for the pilot to warm-up before flipping to HOLD HEADING. The autopilot will still operate during the warmup period but the sensor heading may drift causing the autopilot to steer to the wrong heading.
The indicator LED will blink red if the autopilot is powered on while set to HOLD HEADING and autopilot will steer to the last known heading. The autopilot may steer the boat off course due to the sensor warming up. If the autopilot is steering and the indicator LED begins blinking red, this indicates that power to the autopilot has been interrupted.
4.5. Tacking
Tack angles are approximate and will vary from boat to boat based on the magnetic environment and rudder response. You will have to see which angle works best for your boat. In general, point as high as you can while keeping good boat speed before tacking. Set Deadband to lowest setting (MIN) for the most accurate tacking—this will keep the boat closest to the new heading after tacking.
Simultaneously hold down the 1° and 10° buttons for the direction you wish to tack. Keep both buttons pressed for five seconds. Release buttons to tack.
Port Tack
Simultaneously press Port 1° and 10° for five seconds and release.
Starboard Tack
Simultaneously press Starboard 1° and 10° for five seconds and release
The Rudder control must be set high enough and the boat must have adequate speed and rudder response for the tacking feature to work correctly. Keep an eye on boat response to avoid hitting the rudder stops; flip to Standby and hand steer if boat does not respond to the tack well or gets caught in irons. Making inadequate headway, pointing too high, or having unbalanced sails can cause the boat to lose speed and have poor response to the rudder—go to Standby and disengage the clutch to avoid hitting rudder-stops. If the boat is not tacking far enough, the tack angle can be increased; if tacking too far the tack angle can be decreased. Depending on the conditions and the boat’s momentum, the boat may carry past the tack before correcting to the final heading.
Adjusting the Tack Angle
The autopilot comes manufactured with the Tack Angle set to 100°. The Deadband control shows Tack Angle settings from 60°-120° (the lighter colored numbers). Turn the Deadband control to the desired tack angle. Hold the 10° Port and 10° Starboard buttons down simultaneously for two seconds then release them. Remember to return the Deadband control to desired deadband setting afterwards.
4.6. Rudder Control
The Rudder control determines how far the pilot turns the wheel (and rudder) when a heading correction is needed. Low settings result in smaller wheel corrections, higher settings in larger wheel corrections. The corrections are proportional to the amount of heading change needed: If the boat is off-course by a small amount, the pilot will make a small correction. If the boat is off-course by a large amount, the pilot will make a large correction. The ideal Rudder setting is high enough to return the vessel to heading with just one or two corrections.
The boat must be balanced for consistent steering and respond to the wheel consistently. The Rudder control will not account for excessive play in a boat’s steering system.
The Rudder control also functions as the power switch for the autopilot
The Rudder control is used to match the CPT’s response to your boat’s steering needs. Some vessels take many turns of the wheel to move the rudder, while others take only a few. The Rudder control adjusts for this. Generally, full keel boats with more wheel turns lock-to-lock take a higher Rudder setting. Lighter displacement boats with more responsive helms will need a lower Rudder setting. Almost all boats require a Rudder setting of 3 or higher.
If the Rudder control is set too high the pilot will turn the wheel too far and over-steer: lower the Rudder setting.
If the Rudder control is too low, the autopilot will make many small repeated corrections in one direction that are too small. The boat may gradually fall off and the pilot will not keep the boat on heading. If the pilot is responding with many smaller repeated corrections in one direction, raise the Rudder setting.
Either of these situations is relatively easy to identify and, with some experimentation underway, you should be able to find the correct setting for your boat.
A Rudder setting that works while sailing in lighter winds may have to be changed when winds increase.
A boat may require a slightly higher Rudder setting at low speeds than at higher speeds.
A sailboat may require a higher setting when running than when beating and a higher setting when sailing than when motoring.
Full Keel Boats: A full keel boat with 3-4 turns lock-to-lock will typically use a Rudder setting of 5-6.
Fin Keels and Spade Rudders: Response to the wheel may be more sensitive. The Rudder setting will depend on the boat’s response to the rudder, and you will need to see what setting works best. It may take more balancing and de-tuning to achieve steady steering and prevent the boat from reacting to every gust or slight condition change. With increased speed downwind, response to the rudder increases, and lowering the Rudder setting slightly works well. If the boat is easily under-steered, over-steered, or has wheel play, the Rudder setting may be a compromise between the two.
Disengage the CPT if you are not making headway
4.7. Deadband Control
The Deadband control determines how far the vessel can stray beyond the target heading before a correction is made. You may think of it as the autopilot “dead range”. There is always some deadband range within which the pilot does not activate. If this deadband is small, 1°-2° for instance, the pilot motor will continuously run, making port and starboard corrections. In a seaway a vessel will yaw back and forth as it makes its way over the waves, but generally it will have enough directional stability to keep a good average heading. The deadband adjustment permits the boat to work its way through the waves without continuously using the rudder to try to fight the natural weaving and motion of the hull.
Start out with the Deadband set to minimum when first using the CPT. Turning the control clockwise increases the Deadband.
Most boats steer well at settings of 2-3 in swells, with lower settings in flat water.
On long passages, turning the Deadband and Rudder controls a bit higher can reduce battery use while still providing a good average course.
A Deadband of “5” will allow the boat to range about 10° to port or starboard of the target heading; the pilot will make a correction if the boat strays more than 10° to port or starboard.
Rhythmic CPT steering corrections, in time with the roll of the boat, indicate that the Deadband may be too low. Increase Deadband slightly to avoid constant correction. A low Deadband does not always mean that the boat will maintain a straighter course: the pilot may oversteer if the Rudder setting is too high. In rougher seas, the Deadband can be set higher to avoid constant corrections. A lower Deadband setting is generally beneficial when sailing downwind or in flat water. Lower Deadband settings mean higher sensitivity to heading changes; higher Deadband settings mean lower sensitivity to heading changes.
Most of the CPT’s steering action should be periodic corrections. Raise the deadband a bit to avoid excessive battery drain and wear on the CPT.
4.8. Control Summary
The Rudder control determines how far the wheel should be turned when heading corrections are needed.
The Deadband control determines when a heading correction is needed—sensitivity to heading changes and seas or “dead range”. The autopilot will attempt to hold the tightest course when the Deadband is set to the minimum.